Стабилизация управляемых колес
Этот пост написан пользователем Sports.ru, начать писать может каждый болельщик (сделать это можно здесь).
Где-то неделю назад я в статусе предлагал всем подумать над заданным вопросом:
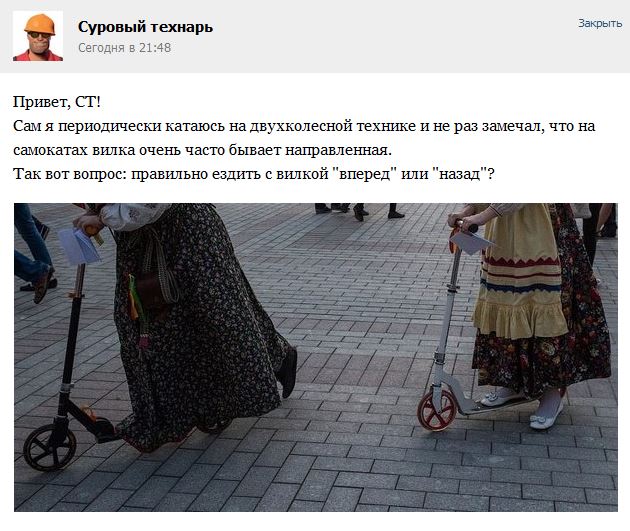
И вот, пришла пора поразмышлять нам вместе. Прежде, чем получить ответ на обозначенный на картинке вопрос, придется, как обычно, изложить немного теории.
Итак, допустим, мы хотим ехать прямо, однако наше колесо под действием неких внешних воздействий (неровность дороги, боковой удар колесом, зазоры в рулевом приводе и т.д.) повернулось на какой-то угол. При этом автомобиль по инерции продолжает ехать прямо, а в пятне контакта возникает боковая сила, которая, с одной стороны, будет поворачивать наше транспортное средство в сторону повернутых колес, а с другой стороны – пытаться вернуть колесо в прямолинейное положение, параллельно вектору скорости:
(зависимость этой силы от угла увода колеса в принципе существует, но она непроста, на этом защищена не одна докторская)
Как же эта сила будет действовать на повернутое колесо?
В случае, если продолжение оси шкворня (оси, относительно которой вращается колесо), будет располагаться впереди центра колеса, эта сила будет создавать стабилизирующий момент:
В противном случае эта сила наоборот, будет стремиться дальше отклонить колесо от прямолинейного движения:
Таким образом, для стабилизации управляемых колес нам необходим первый случай. Реализовать его можно двумя путями.
1. Смещением оси шкворня вперед:
2. Или наклоном оси шкворня:
Ну и конечно, никто не исключает комбинацию этих двух путей, что и можно наблюдать на белом самокате:
Такая стабилизация называется скоростной – потому что на стоящем автомобиле она не проявляется, зато стабилизирующий момент растет с ростом скорости.
P.S. Блог все-таки пишет о спорте, и приведенные рассуждения больше справедливы для автомобилей с их высокими скоростям и весами под тонну, а на самокате особой разницы заметно не будет. Если хотите, катайтесь, как на черном самокате, но в этом случае отпускать руль надолго я бы не советовал.
P.P.S. В реальной жизни очень легко получить пример нестабилизированного колеса: попробуйте посильней разогнаться при езде задним ходом. Только руль держите крепче, он начнет вырываться. И меня потом не обвиняйте:)
P.P.P.S. Это только один из углов установки управляемых колес. Тем не менее, в стабилизации участвует еще один – поперечный угол наклона шкворня. О нем – в следующий раз.